上溢和下溢¶
- 下溢(underflow)是一种极具毁灭性的舍入误差.当接近零的数被四舍五入为零时发生下溢
- 上溢(overflow)是一种极具破坏力的数值错误形式.当大量级的数被近似为\(\infty\)或者\(-\infty\)时发生上溢,进一步的运算通常会导致这些无限值变成非数字.
- softmax 函数(softmax function)可以对上溢和下溢进行数值稳定的一个函数,softmax函数经常用于预测与Multinoulli分布相关联的概率,定义为:
基于梯度的优化方法¶
大多数深度学习算法都涉及某种形式的优化.优化指的是改变\(x\)以最小化或最大化某个函数\(f(x)\)的任务.我们通常以最小化\(f(x)\)指代大多数最优化问题,最大化可以经由最小化算法最小化\(-f(x)\)来实现
我们把要最小化或最大化的函数称为目标函数(objective function)或者准则(criterion).当我们对其进行最小化时,也把它称为代价函数(cost function),损失函数(loss function)或者误差函数(error function)
导数¶
导数(derivative):设函数\(y=f(x)\)在点\(x_0\)的某邻域\(U(x_0)\)内有定义,当自变量\(x\)在点\(x_0\)处取得增量\(\triangle x\)(\(\triangle x \neq 0\) 且\(x_0+\triangle x \in U(x_0)\))时,相应的函数\(y\)取得增量:
\(\(\triangle y = f(x_0 + \triangle x)-f(x_0)\tag{1}\)\)
若极限
\(\(\lim_{\triangle x \rightarrow0}\frac{\triangle y}{\triangle x} = \lim_{\triangle x \rightarrow0}\frac{f(x_0 + \triangle x)-f(x_0)}{\triangle x}\tag{2}\)\)
存在,则称函数\(y=f(x)\)在点\(x_0\)可导,并称此极限值为函数\(y=f(x)\)在点\(x_0\)的导数,记作\(f^\prime(x_0)\)或者\(\left.\frac{dy}{dx}\right | _{x=x_0}\)
由上面的定义可得若曲线\(y=f(x)\)存在一点\((x_0,y_0)\),并且在这点上可导,导数为\(f^\prime(x_0)\),那么导数\(f^\prime(x_0)\)就是该点的斜率.
梯度下降(gradient descent)导数对最小化一个函数很有用,当\(\triangle x\)足够小时,\(f(x-\triangle x{\rm sign}(f^\prime(x)))\)是比\(f(x)\)小的,因此我们可以将\(x\)往导数的反方向移动一小步来减小\(f(x)\).这种技术称为梯度下降
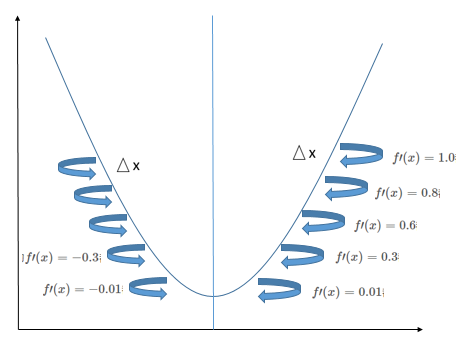
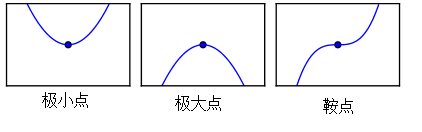
在不断重复上面操作后,最终可以得到\(f^\prime(x)=0\),改点称为临界点(critical point)或驻点(stationary),这个驻点可能是极大点(maximum),或者是极小点(minimum),还有可能是鞍点(saddle point),还要进一步计算.
- 当驻点的左边的\(\triangle x\)距离的\(f^\prime(x)\)小于0,而驻点的右边边的\(\triangle x\)距离的\(f^\prime(x)\)大于0,则该驻点是极小值
- 当驻点的左边的\(\triangle x\)距离的\(f^\prime(x)\)大于0,而驻点的右边边的\(\triangle x\)距离的\(f^\prime(x)\)小于0,则该驻点是极大值
- 当驻点的距离左右两边的\(\triangle x\)距离的\(f^\prime(x)=\)都小于0或都大于0,则该驻点是鞍点
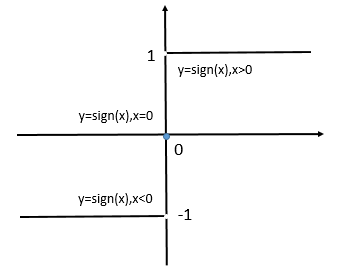
在上面用到了\({\rm sign}\)函数,下面的就是\({\rm sign}\)定义:
\(\({\rm sign}(x) = \left\{ \begin{matrix} 1,x>0 \\\ 0,x=0 \\\ -1,x<0 \end{matrix}\right. \tag{3}\)\)
\({\rm sign}\)函数的坐标图:
偏导数¶
当函数只有二维输入时,其只有一个驻点,所以这个驻点就是它的最小点或者最大点。但是通常遇到更多的是多维输入的函数,它具有多个驻点,所以它有多个极小点和极大点,如下图。所以通过上面的方法很难找到最大点或者最小点。
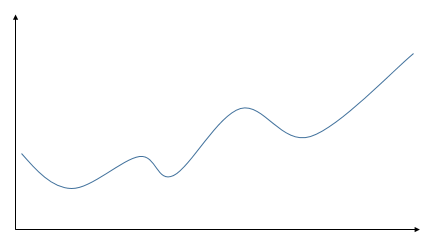
针对具有多维输入的函数,我们就需要用到偏导数(partial derivative)的概念了。
设函数\(z=f(x,y)\)在点\((x_0,y_0)\)的某个领域内有定义,当\(y\)固定在\(y_0\)而\(x\)在\(x_0\)处有增量\(\triangle x\)时,相应地函数有增量
\(\(f(x_0+\triangle x,y_0)-f(x_0,y_0)\tag{4}\)\)
如果有极限
\(\(\lim_{\triangle x \rightarrow 0}\frac{f(x_0+\triangle x,y_0)-f(x_0,y_0)}{\triangle x}\tag{5}\)\)
存在,则称此极限为函数\(z=f(x,y)\)在点\((x_0,y_0)\)处对\(x\)的偏导数,记作:
\(\(\left.\frac{\partial f}{\partial x}\right|_{x=x_0,y=y0}\quad 或\quad f^\prime_x(x_0,y_0)\tag{6}\)\)
同理,函数\(z=f(x,y)\)在点\((x_0,y_0)\)处对\(y\)的偏导数 为:
例求\(f(x,y)=x^2+3xy+y^2\)在点(2,1)处的偏导数\(f_x(2,1),f_y(2,1)\).
解:把\(y\)看作常数,对\(x\)求导得到
\(\(f_x(x,y)=2x+3y\tag{8}\)\)
把\(x\)看作常数,对\(y\)求导得到
\(\(f_y(x,y)=3x-2y\tag{9}\)\)
代入\(x=2,y=1\),故所求偏导数为:
\(\(f_x(2,1) = 7,f_y(2,1)=4\tag{10}\)\)
梯度(gradient)是相对一个向量求导的导数:\(f\)的导数是包含所有偏导数的向量,记作\(\nabla_xf(x)\)。梯度的第\(i\)个元素是\(f\)关于\(x_i\)的偏导数。在多维情况下,临界点是梯度中所有元素都为零的点。
约束优化¶
有时候,在\(x\)的所有可能值下最大化或者最小化一个函数\(f(x)\)不是我们所希望的,相反,我们可能希望在\(x\)的某些集合\({\Bbb S}\)中找到\(f(x)\)的最大值或者最小值,这个称为约束优化(constrained optimization)
Karush-Kuhu-Tucker(KKT)方法是针对约束优化非常通用的解决方案,KKT方法是Lagrange乘子法(只允许等式约束)的推广
参考资料¶
- lan Goodfellow,Yoshua Bengio,Aaron Courville.深度学习(中文版).赵申剑,黎彧君,符天凡,李凯,译.北京:人民邮电出版社
- 郭游瑞,徐应祥,任阿娟,赵志琴.高等数学简明教程.上海:复旦大学出版社